Система 4WS — это система, обеспечивающая маневрирование автомобиля, путем поворота четырёх колёс, а не двух, как на большинстве обычных автомобилей. При движении с обычной скоростью эта система обеспечивает одновременный поворот передних и задних колёс в одном направлении, чем обеспечивается улучшение устойчивости автомобиля на дороге, причём задние колёса поворачиваются на гораздо меньший угол, нежели передние.
При движении с маленькой скоростью ( примерно до 10 км/ч ), например на стоянке, передние и задние колёса поворачиваются в противоположные стороны, тем самым уменьшая радиус поворота и повышая » вёрткость машины » Существуют различные разновидности таких систем. На некоторых передние и задние колёса на любой скорости поворачиваются в одну сторону.
На других , при движении с малой скоростью, колёса поворачиваются в разные стороны, а на большей скорости — в одну. А есть такие, у которых между режимами малой скорости и большой, при которой колеса поворачиваются в одну сторону, существует скоростной интервал, на котором данная система не функционирует.
В разговорах с людьми, эксплуатирующими автомобили с системами 4WS, или аналогичными, можно услышать много хороших откликов об управляемости таких машин и о том, что повороты можно проходить на высокой скорости без скольжения и заносов. Это действительно так, но существует недостаток подвесок с такими системами, обусловленный плохим качеством наших дорог. Дело в том, что у таких подвесок » шариков » больше чем у обычных подвесок, и поэтому ремонт ходовой части обходится дороже
История 4WS
Фактически, управление с 4 колесами — не сложная концепция, не имеет смысла выяснять, кто ее «изобрел». Наиболее трудно осуществить эту технологию эффективно, с достаточной выгодой, чтобы оправдать дополнительную стоимость. Первая компания, которая внедрила 4WS, была вероятно Мерседес-бенц. В 1938, было сделало военное транспортное средство для передвижения по пересеченной местности, называемое 170VL, которое поворачивало задние колеса обратно передним колесам, чтобы сократить радиус поворота. Но Мерседес никогда не использовал 4WS в обычных автомобилях.
Первый 4WS автомобиль пути массового производства был Nissan Skyline (не GT-R) примерно в 1985. В отличие от Мерседеса, задние колеса поворачивались в том же самом направлении, что и передние колеса с максимальным углом 0.5 градуса, что помогало стабильности. Однако, система Skyline не отвечает нашему определению 4WS, потому что тут просто поворачивалась целая задняя подвеска.
Honda Prelude — новая эра 4WS
Первое массовое производство 4WS автомобилей была Honda Prelude (1987). Наиболее интересным и также патентованным новшеством является то, что угол поворота задних колес зависит от передних колес. При вращении рулевого колеса, первоначально задние колеса управляются слегка, в пределах 1.7 градуса, в том же самом направлении что и передние колеса. Это улучшает стабильность при движении с большой скоростью.

Продолжение поворота рулевого колеса полностью изменит направление поворота задних колес. Это используется, чтобы повысить маневренность движения на повороте с низкой скоростью. Диаграмма на картинке показывает эту характеристику. Механизм Honda Prelude был очень прост, только использует эксцентриковый вал, в комбинации с планетарным механизмом, вполне механическим. Электронный вспомогательный механизм появился в следующем поколении Honda Prelude в 1992 году.
4WS — от популярности до упадка
От конца 80-х к сегодняшним дням, 4WS остался принятым исключительно Японскими автомобильными изготовителями. Западные автомобильные изготовители, казалось, были не очень заинтересованными (Audi, по слухам, собирался развить 4WS для A8, но этого не случилось). Даже Японские производители сами начинают терять интерес.
Toyota:
Производитель Номер 1 никогда не запускала 4WS в производство (грубая ошибка — 4WS встречается по крайней мере на Celica и Camry — прим. PaNick).
Nissan:
после смерти 300ZX, пропуская 4WS от Infiniti Q45, только Skyline остается с предложением 4WS.
Honda:
с тех пор как появился активный дифференциал в самой последней Prelude, 4WS исчез в этой компании.
Mitsubishi:
после того как Galant VR4 и Diamante стали выпускаться без 4WS, только старый GTO все еще имеет 4WS.
Mazda: 929 — все еще единственная 4WS модель.
4WS — под серьезной угрозой со стороны Электронным Управления Стабильности и Yaw Control, оба из которых могут исправлять недостаточную управляемость подобно 4WS, но без большой дополнительной стоимости и веса.
Skyline HICAS
Однако, Nissan Skyline GT-R все еще доказывает, что 4WS достойна для применения. С добавлением компьютера, HICAS система позволяет сильно — управляемое движение, которое не может быть осуществлено любыми альтернативами. При повороте, задние колеса будут управлять в противоположном направлении, сначала чтобы «обострить» угол поворота.

Тогда, когда по мнению датчиков, которые отвечает за управление, автомобиль развернулся, задние колеса, будет управляться в том же самом направлении как передние колеса, таким образом немедленно представляет скольжение с задней шиной, которые помогают стабильности. Так как компьютер контролирует целый процесс, избыточная поворачиваемость — всегда под проверкой. Вы можете не бояться потери управления
4WS — это не 4WD !
Первые полноуправляемые версии, что появились среди модификаций автомобилей Honda Prelude в 1987 году, снабжались механической системой с хитроумной кинематической связью между рулевыми рейками передних и задних колес. Кстати, тогда же на японском рынке произошел настоящий полноуправляемый бум: Mitsubishi Galant и Sigma, Mazda 626, а два года спустя и Toyota Celica — все обзавелись версиями с управляемыми задними колесами.
Применение систем управления всеми четырьмя колесами преследует три цели.
Первая — получить переменную чувствительность автомобиля к повороту руля. Ведь при тихой езде по городским улочкам лучше иметь «острое» рулевое управление- чтобы не накручивать баранкой при каждом маневре. А на автостраде «острый» руль может вызвать проблемы — машина будет слишком резко реагировать даже на небольшие подруливания. Вторая цель — улучшить маневренность автомобиля при парковке или развороте в стесненных городских условиях, то есть уменьшить радиус поворота. И третья — повысить курсовую устойчивость при резких маневрах на высокой скорости.
Нынешняя система 4WS (4 Wheel Steer, то есть 4 управляемых колеса), устанавливаемая по заказу на купе Honda Prelude 2,2 VTi, является развитием предыдущей электронноуправляемой системы, которая в 1991 году сменила механическую. Задние колеса здесь поворачиваются с помощью специального рулевого механизма с электроприводом, встроенного в довольно сложную заднюю подвеску. А управляет им специальный электронный блок, который получает от нескольких датчиков информацию о скорости автомобиля, об угле поворота руля, передних и задних колес и т. д.
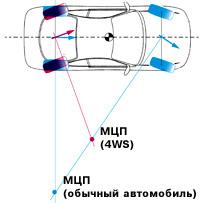
Поворот задних колес в ту же сторону, что и передних, позволяет сохранить направление и скорость движения центра масс автомобиля, но значительно увеличить мгновенный радиус поворота. При этом уменьшаются действующие на автомобиль боковые силы и, как следствие, повышается курсовая устойчивость.
При движении на малой скорости задние колеса поворачиваются в противофазе с передними, и мгновенный радиус поворота уменьшается. Работает система 4WS в двух режимах. На малой скорости задние колеса поворачиваются в сторону, противоположную передним, и при маневре той же кривизны руль нужно будет вращать на меньший угол.
То есть чувствительность рулевого управления будет выше, а вдобавок автомобиль станет более маневренным. К примеру, при развороте передние колеса будут вывернуты до упора влево, а задние — вправо на угол до восьми градусов. Радиус разворота при этом уменьшится на 15% по сравнению с обычным автомобилем и составит всего 4,7 метра!
А при движении на большой скорости — в быстром вираже или при перестроении из ряда в ряд на автостраде, — задние колеса, наоборот, будут поворачиваться на небольшой угол в ту же сторону, что и передние.
К примеру, автомобиль, совершая маневр на автостраде, будет словно не поворачивать, а «переходить» из ряда в ряд параллельно полосам разметки. Что это даст ? Машина будет двигаться по дуге меньшей кривизны и большего радиуса. Момент, поворачивающий машину вокруг вертикальной оси, будет меньше — стало быть, уменьшится и риск потери курсовой устойчивости и развития заноса задней оси.
Можно рулить и тягой !
А вот система ATTS (Active Torque Transfer System — система активного распределения крутящего момента), которую хондовцы тоже применяют для улучшения управляемости, работает по совершенно другому принципу. Сначала фирма использовала этот механизм в межосевых дифференциалах своих полноприводных автомобилей для распределения крутящего момента между ведущими мостами. А теперь приспособила его для легкового автомобиля с приводом на одну ось. Зачем? Для этого сначала обьясним принцип ее действия.

Представим себе переднеприводный автомобиль, который проходит под тягой крутой поворот. Что происходит с передними колесами в пятне контакта с дорогой? Главными здесь являются две силы — «тяговая», которая ускоряет машину, и боковая, которая заставляет машину поворачивать. Обе они «опираются» на силу трения, возникающую в пятне контакта. А та, в свою очередь, ограничена лимитированными сцепными свойствами шины и покрытия.

Передняя ось обычного автомобиля: при ускорении в повороте разгруженное колесо (слева) с меньшими возможностями по восприятию сил в пятне контакта (кружок меньшего диаметра) не реализует боковую составляющую. С системой ATTS: тяговая сила на разгруженном колесе стала меньше, и за счет этого появилась возможность реализовать поперечную силу. А увеличившаяся тяга на нагруженном колесе дополнительно «тащит» автомобиль в поворот.
Теперь присмотримся к внутреннему по отношению к центру поворота колесу. Из-за действия центробежной силы оно оказывается разгруженным, то есть в худших условиях по сцеплению с дорогой. Соответственно, уменьшится и та суммарная сила, сложенная из тяговой и боковой, которую может воспринять колесо, и поэтому оно в меньшей степени будет способно ускорять и поворачивать автомобиль. Вот если бы часть тяги перебросить на наружное по отношению к центру поворота колесо… Ведь именно оно при маневре оказывается более нагруженным и поэтому может воспринять больше сил — и боковых, и продольных.

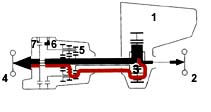
Именно это и делает система ATTS. Она перераспределяет крутящий момент между ведущими колесами, убирая излишек тяговой силы с внутреннего колеса и перебрасывая его на более нагруженное внешнее. В результате у малонагруженной внутренней шины, освобожденной от излишка тяги, появляется больше возможностей для реализации боковой силы, так необходимой в повороте. А что дает увеличение крутящего момента на наружном колесе? Появляется дополнительный момент, который стремится «затащить» автомобиль в поворот. Здесь уместна аналогия с весельной лодкой: ведь на ней можно грести обоими веслами и управлять траекторией с помощью руля на корме, а можно одним веслом загребать сильнее — и лодка повернет в противоположную сторону.Задачу перераспределения крутящего момента выполняет хитроумный механизм с планетарными передачами и двумя многодисковыми пакетами фрикционов мокрого типа, как в гидромеханических коробках передач.
Смонтирован исполнительный механизм системы ATTS после дифференциала коробки передач и умещается в небольшом цилиндрическом корпусе между полуосями передних колес.
Когда автомобиль едет прямо, фрикционы разомкнуты и планетарные шестерни системы вращаются вхолостую — ничто не мешает обычному дифференциалу выполнять свою работу, поровну распределяя идущий от двигателя крутящий момент между ведущими колесами.

Как и весельная лодка, автомобиль с системой ATTS «подгребает» наружным колесом, в результате чего появляется дополнительный момент, поворачивающий машину вокруг вертикальной оси. Но вот повернут руль, и по команде от блока управления один из фрикционов с помощью гидравлического исполнительного устройства частично или полностью блокируется.
При этом на одно из колес перебрасывается до 80 процентов крутящего момента с противоположного колеса. Работой системы управляет электронный блок, анализирующий сигналы от нескольких датчиков. Его процессор всегда знает, с какой скоростью движется автомобиль, какова тяговая сила двигателя (то есть его обороты и степень открытия дроссельной заслонки), как повернуто рулевое колесо.

А чтобы учесть действующие на автомобиль боковые силы, электроника системы ATTS пользуется информацией еще от двух датчиков. Один оценивает поперечное ускорение, а второй отслеживает угловую скорость вращения автомобиля вокруг вертикальной оси. В результате система ATTS должна помочь автомобилю лучше держать дорогу и уменьшить свойственную переднеприводным автомобилям недостаточную поворачиваемость, когда машина стремится уйти наружу поворота, заставляя водителя компенсировать это доворотом руля.
Как заявляет фирма, автомобиль с системой ATTS всегда демонстрирует нейтральную поворачиваемость, то есть лучше слушается руля и точнее следует заданной траектории маневра, требуя на виражах на 10-30% меньшего угла поворота руля, чем обычно.
К этому можно добавить, что система ATTS весит 20 кг (что вдвое больше, чем 4WS), и требует замены рабочей жидкости ATF через 100000 км пробега — как современная автоматическая коробка передач.
Обозначения цифрами: 1 — трансмиссия; 2 — правое колесо; 3 — дифференциал; 4 — левое колесо; 5 — планетарные передачи; 6 — правый фрикцион; 7 — левый фрикцион.
Сейчас купе Honda Prelude 2,2 VTi — один из немногих автомобилей в мире, который одновременно имеет несколько версий с разными активными системами, улучшающими управляемость.
Кстати, Honda имеет еще одну систему — VSA, Vehicle Stability Assist. Здесь задействованы антиблокировочная и противобуксовочная системы с вышеупомянутыми датчиками поперечного ускорения. VSA подтормаживает в повороте одно из колес, корректируя поведение автомобиля при сносе или заносе.
4WS в России
Полноуправляемый автомобиль на базе УАЗ-31512

На автомобиле реализована электромеханическая система управления поворотом колёс переднего и заднего моста. Управление поворотом колёс механически разделено, что позволяет поворачивать колёса автомобиля с разными алгоритмами:
- поворот колёс только переднего моста;
- поворот колёс только заднего моста;
- поворот колёс переднего и заднего моста в противофазе (достигается радиус поворота в пределах 2-2,5 метров);
- поворот колёс переднего и заднего моста синхронно (движение автомобиля боком).
Все эти режимы позволяют максимально повысить маневренность и проходимость автомобиля на пересечённой местности. При разработке системы управления использовались штатные трансмиссионные элементы автомобиля УАЗ и оригинальные компоненты производства НПП «Солитон».
Этот автомобиль демонстрировался на выставках «Автоэкзотика-2004» и «Автомобили двойного назначения» в г. Бронницы, где пользовался неизменным интересом у зрителей.
Плавающий полноуправляемый автомобиль на базе серийно выпускаемых агрегатов отечественных легких внедорожников «ЛЕШИЙ»

Весьма похвально. Даже с учетом того, что это штучная ручная сборка при полном отсутствии хайтека. Однако, интересно — через сколько километров это чудо развалится
